Plan in Sandbox, Navigate in Open Worlds: Learning Physics-Grounded Abstracted Experience for Embodied Navigation
ICML 2026. (arXiv:2605.10118)
Abstract
This work introduces SAGE, a generative experience-driven framework for embodied navigation that trains agents through physics-grounded semantic abstractions rather than relying only on photorealistic simulation. The framework synthesizes sandbox tasks, distills structured embodied experience through reinforcement learning, and transfers learned priors into open-world control, improving planner-assisted navigation performance while showing encouraging transfer to physical indoor robot deployment.
The project studies how embodied agents can plan in simplified, physics-grounded semantic environments and transfer those abstracted experiences to open-world navigation. It was accepted to ICML 2026 on May 1, 2026 and is now available on arXiv as arXiv:2605.10118.
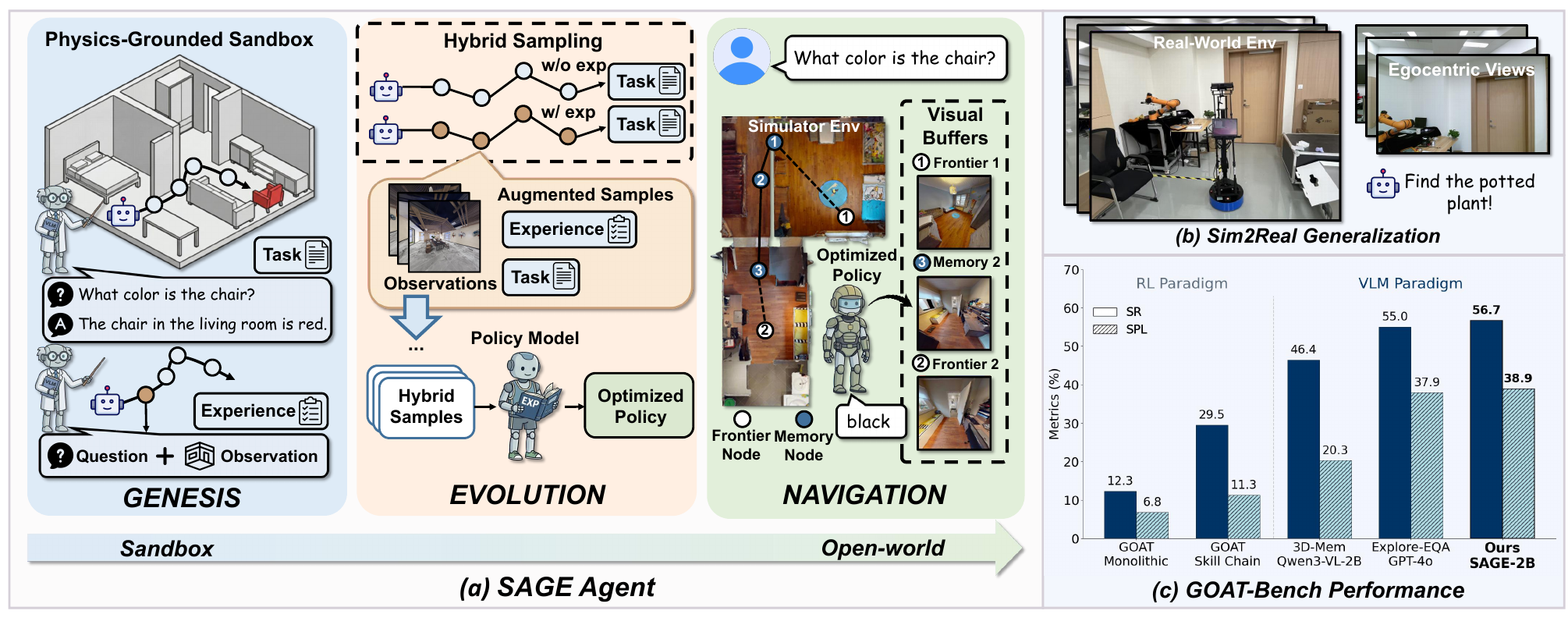
SAGE agent overview. The framework uses a physics-grounded sandbox for self-evolving data generation and policy optimization, then transfers learned priors to open-world embodied navigation.
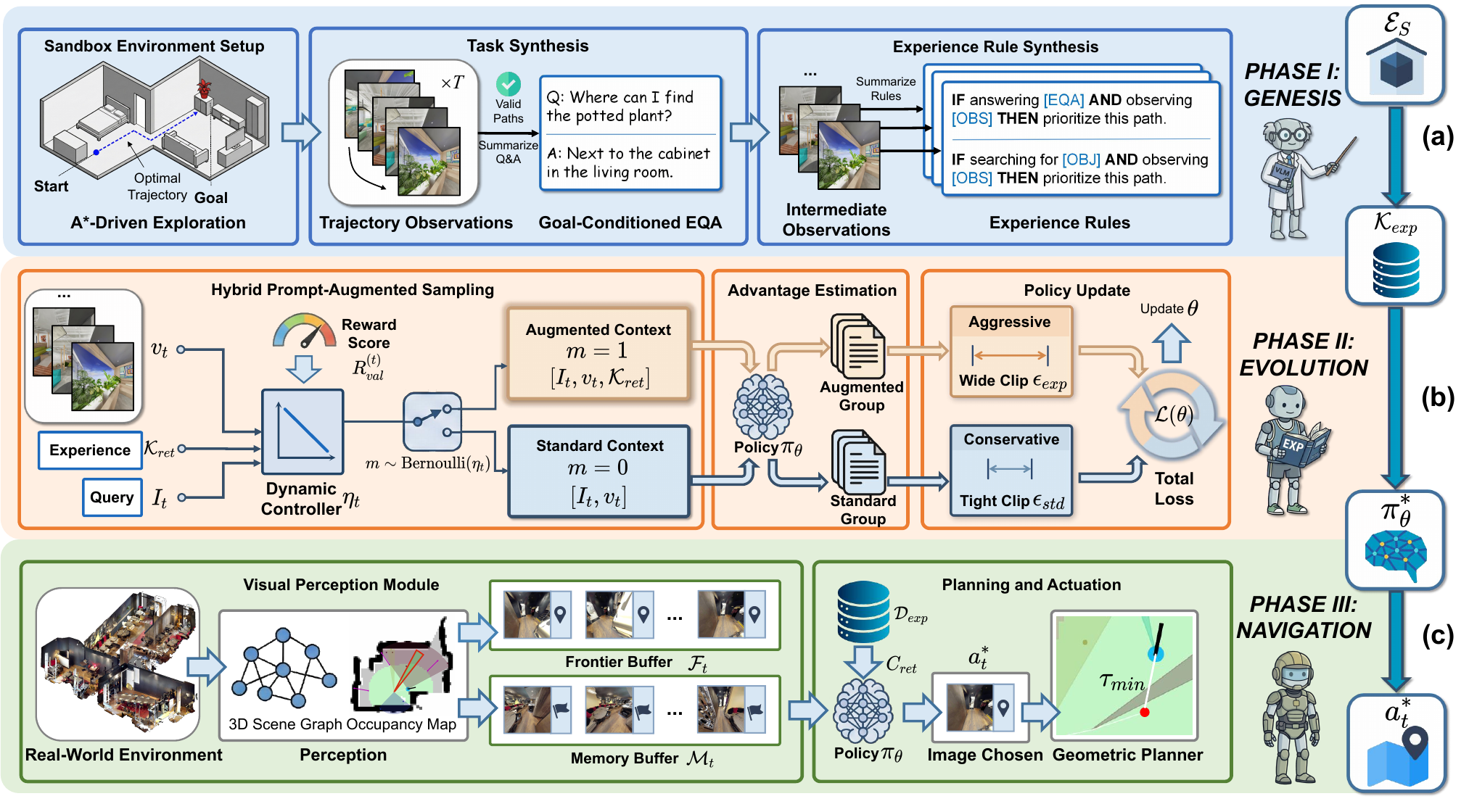
SAGE framework. The system operates through Genesis, Evolution, and Navigation phases, connecting sandbox task synthesis, hybrid prompt-augmented policy optimization, and real-world planning and actuation.
Materials